The Nova ended up on it's back again, and cracked the puck for the second time. Time to re-mount and re-orient compass-module.
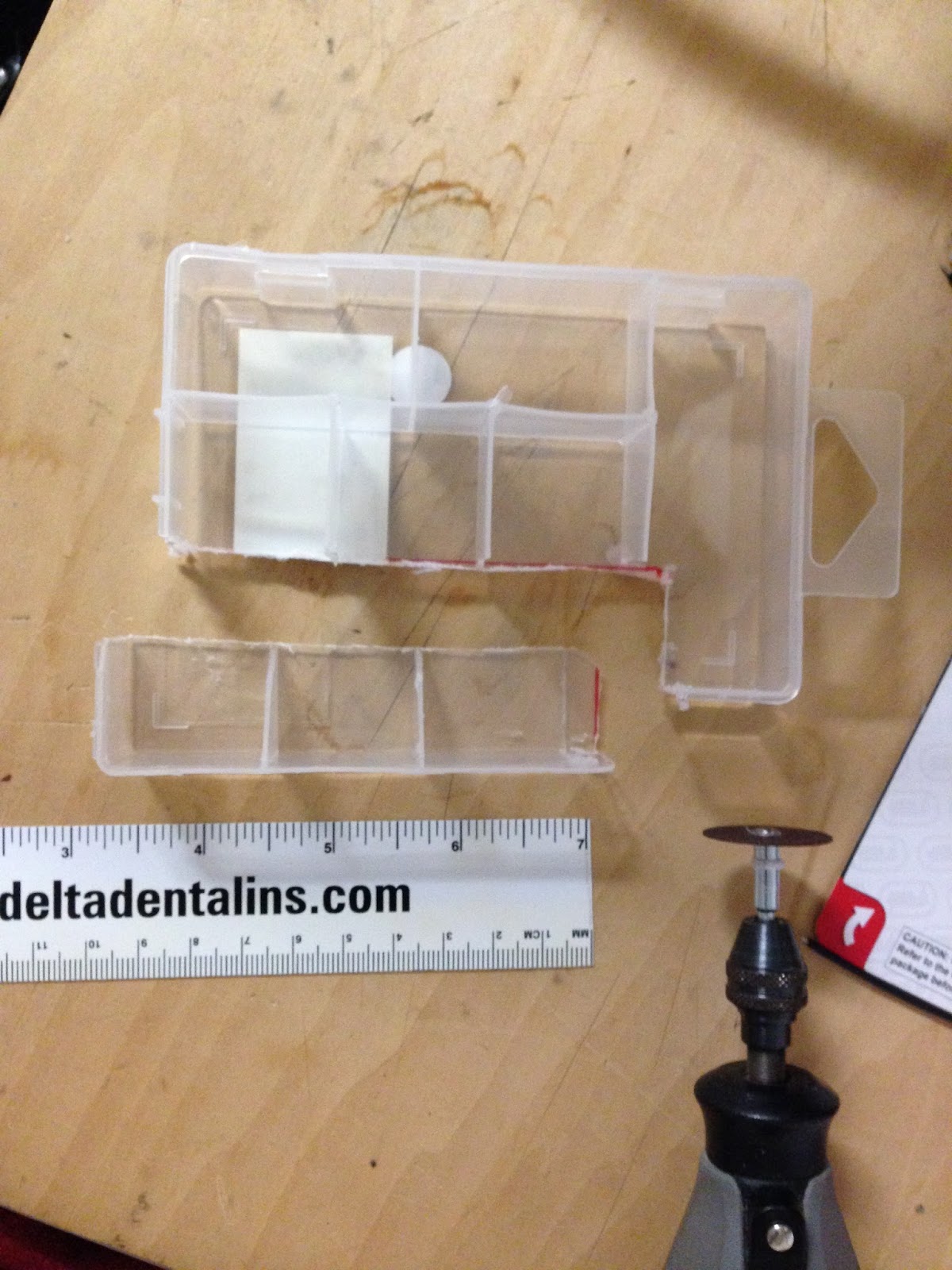
I used Plastruct Solvent to glue white outer-shell back together and let dry over-night. Might as well save this plastic piece since it matches rest of body. Could have stopped there, but I think it needs to be sturdier. Inserted piece of wood with large heat-shrink on it in main hole ... it must fully fill it to keep epoxy from seeping-down. Mount lower puck to level surface so epoxy dries level. Filled puck with about 10ml of 30-minute epoxy (with added hobby fiberglass filler) to adequate level. After it dries over-night, epoxy surface is flat. Cut away tubing to reveal small hole for connector and cable.
The puck is now stiffer and sturdier. With drill-press, drilled small holes thru epoxy for mounting screws and compass hold-down strap.
Even with it mounted slightly forward (with foam tape), notice that compass chip is still perpendicular and parallel to quad center-line. In this orientation, I set parameters to:
COMPASS_EXTERNAL,1 (external compass)
COMPASS_ORIENT,2 (yaw compass 90 degrees)
MissionPlanner HUD would not show proper direction until after initial
compass calibration. First calibration attempt was fast/clean but a poor -434, -21, -14. Second attempt was similar (results +/- 5%). sats=8, hdop=1.8, 3min warm-up, AutoDec. This is prior to re-mounting compass Yawed 90 degrees. With this additional step, compass can stay mounted while puck is removed. It's also obvious that getting actual compass chip even slightly further away from metal (screws) is worth the effort (to get better compass calibration offset results).
Additionally, using de-magnetizer on metal screws and screwdriver got 400's of previous attempts down to low 200's. Final working calibration was -37, -226, 135. sats=8, hdop=3.4, AutoDec. All calibrations were done outside on deck with view of sky.
I might try nylon screws if I can find suitable ones, although, this setup is real sturdy.